



La NASA se prepara para enviar VIPER a la Luna. No es el icónico auto deportivo, sino un vehículo resistente que puede manejar cualquier superficie que la luna le arroje. El Volatile Exploration Rover (VIPER) se probó recientemente en el Centro de Investigación Glenn en Cleveland. El prototipo condujo rampas de prueba y trepó sobre rocas y pozos. También logró simular el tipo de suelo de arenas movedizas en un «sumidero». Pasó con gran éxito, mostrando a los ingenieros cómo manejaría condiciones similares en la Luna.
“Queríamos saber si el rover sería capaz de avanzar en un entorno severamente inundado, a qué velocidad el VIPER podría conducir más lento o cuánta potencia adicional usaría el vehículo debido a las difíciles condiciones del suelo”, dijo Mercedes Herreras Martinez VIPER. Administrador de riesgos. y dirigir el Intercambio Técnico para Ingeniería de Sistemas de Misión en Ames.

Prácticas VIPER en la Tierra para montar la luna
El objetivo era probar la capacidad de VIPER para hacer frente a las condiciones de superficie espinosa que encontraría. Construir un «camino de prueba» lunar fue un proceso sistemático, siguiendo el consejo del equipo científico Weber. El equipo de pruebas de ingeniería seleccionó cuidadosamente los simuladores de suelo para las pruebas. Escogieron a mano las rocas y diseñaron cuidadosamente la forma y el tamaño de los pozos. El objetivo: simular las características reales de la superficie del polo sur de la luna. Ambos equipos tenían una gran cantidad de datos de los que sacar provecho mientras construían la carrera de obstáculos de Weber.


«Usando datos e imágenes de misiones lunares anteriores, creamos varias escenas aleatorias para imitar la topografía de la superficie de la luna, con cráteres y rocas de varios tamaños y formas esparcidas por el fondo del acantilado», dijo Kevin May. Es el pasante en ingeniería de sistemas itinerantes y de misión en Ames que dirigió la preparación del terreno para las pruebas. «Con la ayuda del equipo científico de VIPER, que creó moldes cortados para perfiles de cráteres, pudimos dar forma a características fuera del terreno y dar forma a cráteres con mayor precisión que nunca. Al recrear entornos realistas similares a los de la luna, podemos obtener una mejor idea de cómo se comporta VIPER en la superficie.” .
Mirando debajo del capó de VIPER
VIPER tiene el tamaño de un carrito de golf que recorrerá hasta 20 kilómetros a una velocidad máxima de 0,72 km/h. Llevará tres espectrofotómetros y pozos para estudios del subsuelo, y obtendrá su energía del sol. Se espera que dure unos 100 días, o tres ciclos de la luna, día y noche.
El bus de hardware incluye un complejo de controladores llamado Unidad Representativa de Gravitación Lunar 3 (MGRU3). Esta es una pieza importante de hardware en el sistema de navegación móvil. Controla los motores que envían energía a las cuatro ruedas del rover. Las pruebas en Glenn se centraron en la maniobrabilidad del MGRU3 en condiciones difíciles.
“A diferencia de la mayoría de los motores de automóviles, que usan el acelerador y los frenos para acelerar y desacelerar las cuatro ruedas, los controles del motor VIPER hacen que las ruedas del rover giren a la potencia y velocidad que los conductores desean, con extrema precisión para permitir un mejor rendimiento”, Arnaud Rogge. Es gerente de pruebas e ingeniero de sistemas móviles en el Centro de Investigación Ames de la NASA en Silicon Valley, California. «Estas pruebas nos permitieron verificar el rendimiento del sistema de navegación del rover y ver que funcionaría bien en la Luna».
Enfrentando las condiciones de la luna y practicando la ciencia
VIPER está diseñado para soportar temperaturas extremas que pueden fluctuar por encima de los 260°C durante el ciclo día/noche. Será alimentado por comandos desde tierra, lo que significa que los operadores pueden «conducir» el rover de forma interactiva. Dado que tiene que funcionar en condiciones de poca luz y oscuridad, VIPER está equipado con un sistema de iluminación y cámara. Los ‘faros’ ayudarán al rover mientras explora cráteres oscuros donde el sol nunca brilla.
Este vehículo lunar todo terreno estará equipado con instrumentos científicos. Perforarán y analizarán depósitos de hielo superficiales y subterráneos a diferentes profundidades en muchos entornos de regolito (suelo). Los datos que recopila VIPER ayudarán a los científicos a crear mapas que muestren dónde se encuentran los recursos lunares. También ayudará a localizar depósitos de hielo en la Luna. Sus instrumentos revelarán si el hielo está en forma cristalina o en partículas unidas químicamente a otros materiales. También ayudará a los planificadores de misiones de la NASA a determinar futuros lugares de aterrizaje y la ubicación de Artemis. campamento base lunar.
VIPER debería lanzarse a fines de 2023 y aterrizar en el polo sur de la Luna en la región de Nobile. Aquí hay un video de la NASA que habla sobre la misión y el área que explorará el rover.
para más información
Prototipos VIPER de la NASA a través de una carrera de obstáculos similar a la Luna
Descripción general de la misión VIPER
El rover Artemis de la NASA aterriza cerca de la región Nobile del polo sur de la luna

«Alborotador. Amante de la cerveza. Total aficionado al alcohol. Sutilmente encantador adicto a los zombis. Ninja de twitter de toda la vida».



More Stories
La Vía Láctea sobrevivió a una violenta batalla galáctica contra todo pronóstico científico
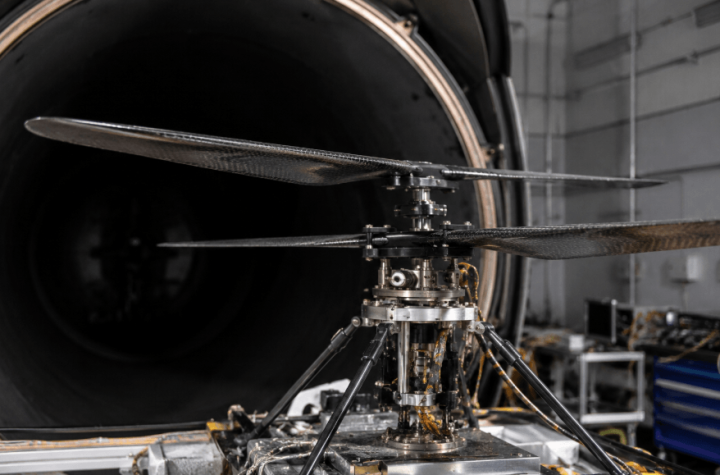
La NASA prueba helicópteros supersónicos para futuras misiones en Marte
La NASA descarta el impacto del asteroide 2024 YR4 contra la Luna en 2032