



CHAMPAGNE, Illinois — Los investigadores han dado un gran paso adelante en el desarrollo de robots saltadores del tamaño de un insecto capaces de realizar tareas en los pequeños espacios que a menudo se encuentran en entornos mecánicos, agrícolas y de búsqueda y rescate.
Nuevo estudio dirigido Ciencias Mecánicas e Ingeniería profesor Sameh Tawfiq Hace una demostración de una serie de robots del tamaño de un escarabajo, lo suficientemente pequeños para caber en espacios reducidos, lo suficientemente fuertes para maniobrar sobre obstáculos y lo suficientemente rápidos para igualar el rápido tiempo de escape de los insectos.

Profesor de Ciencias Mecánicas e Ingeniería Sameh Tawfik.
Imagen cortesía de Mechanical Science and Engineering
enmienda Medios incluidos en la pestaña Archivos y vuelva a ingresarlos según sea necesario.
Los resultados han sido publicados en las Actas de la Academia Nacional de Ciencias.
Investigadores de la Universidad de Illinois en Urbana-Champaign y la Universidad de Princeton han estudiado la anatomía, la mecánica y la evolución del escarabajo clic durante la última década. Estudio 2020 Descubrió que la torsión repentina, la liberación rápida de energía elástica, del músculo enrollado dentro del tórax del escarabajo se activa para permitirles impulsarse en el aire varias veces la longitud de su cuerpo, como una forma de enderezarse si no lo hacen. iban a dar la vuelta sobre sus espaldas.
“Uno de los mayores desafíos con los microbots es encontrar un diseño que sea pequeño, pero lo suficientemente robusto como para moverlo alrededor de obstáculos o escapar rápidamente de situaciones peligrosas”, dijo Tawfik.
En el nuevo estudio, Tawfik y su equipo usaron poca gatillos envueltos – Similar a los músculos de los animales: un mecanismo en forma de viga tira, lo que hace que se tuerza lentamente y almacene energía elástica hasta que se libera e infla automáticamente, impulsando a los robots hacia arriba.
«Este proceso, llamado secuencia de pandeo dinámico, es simple en comparación con la anatomía de un escarabajo», dijo Tawfik. “Sin embargo, la simplicidad es buena en este caso porque nos permite trabajar y fabricar piezas a una escala muy pequeña”.
Guiados por la evolución biológica y los modelos matemáticos, el equipo construyó y probó cuatro configuraciones diferentes de dispositivos, aterrizando en dos configuraciones que podían saltar con éxito sin intervención manual.
«En el futuro, no tenemos un enfoque establecido para el diseño exacto de la próxima generación de estos robots, pero este estudio planta una semilla en la evolución de esta tecnología, un proceso similar a la evolución biológica», dijo Tawfik.
El equipo prevé que estos robots lleguen a espacios reducidos para ayudar a realizar el mantenimiento de máquinas grandes como turbinas y motores a reacción, por ejemplo, al tomar fotografías para identificar problemas.
“También imaginamos que los robots a escala de insectos sean útiles en la agricultura moderna”, dijo Tawfik. Actualmente, los científicos y los agricultores utilizan drones y rovers para monitorear los cultivos, pero a veces los investigadores necesitan un sensor para tocar una planta o tomar una fotografía de una pequeña característica. Los robots a escala de insectos pueden hacer eso”.
Investigadores de la Universidad de Birmingham, Reino Unido. Universidad de Oxford ; La Universidad de Texas en Dallas también participó en esta investigación.
Este estudio fue apoyado por la Agencia de Proyectos de Investigación Avanzada de Defensa, el Instituto de Investigación Toyota de América del Norte, la Fundación Nacional de Ciencias y la Royal Society.

«Alborotador. Amante de la cerveza. Total aficionado al alcohol. Sutilmente encantador adicto a los zombis. Ninja de twitter de toda la vida».



More Stories
La Vía Láctea sobrevivió a una violenta batalla galáctica contra todo pronóstico científico
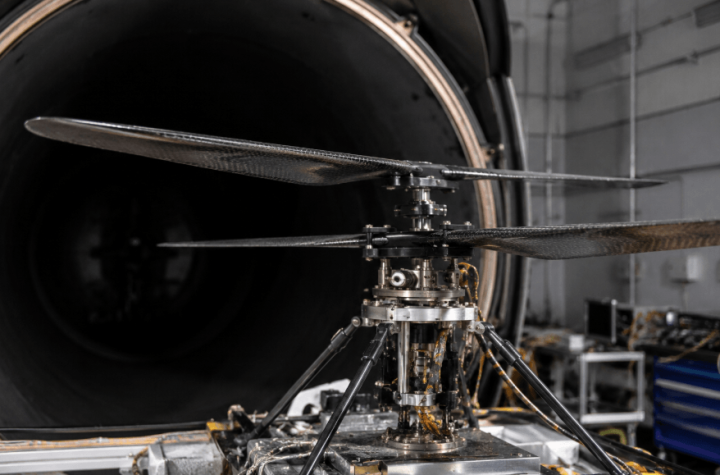
La NASA prueba helicópteros supersónicos para futuras misiones en Marte
La NASA descarta el impacto del asteroide 2024 YR4 contra la Luna en 2032