




Esta imagen sin fecha proporcionada por William Roderick / Stanford University muestra el robot de agarre desarrollado por Stanford Engineers basado en estudios de aves.
WASHINGTON: Inspirados por la forma en que las aves aterrizan y se posan en las ramas, un equipo de ingenieros de la Universidad de Stanford ha construido mangos robóticos que pueden adaptarse a drones, lo que les permite recoger objetos y agarrarse a diferentes superficies.
Este avance podría permitir que los robots voladores conserven energía en situaciones en las que se les requiera que se desplacen, por ejemplo, en misiones de búsqueda y rescate, o ayudar a los ecólogos a recopilar datos más fácilmente en los bosques.
«Queremos poder aterrizar en cualquier lugar, y eso es lo que lo hace emocionante desde una perspectiva de ingeniería y robótica», dijo a la AFP David Lintink, coautor de un artículo sobre el diseño en Science Robotics publicado el miércoles.
El equipo llamó a su proyecto el «Embrague de aire inspirado en la naturaleza» o SNAG.
La robótica a menudo recurre a los animales para resolver problemas de ingeniería difíciles, pero simular la forma en que las aves vuelan y se posan después de millones de años de evolución no es tarea fácil.
Las ramas varían en tamaño, forma y textura. Puede estar cubierto de líquenes o musgo, o puede estar resbaladizo por la lluvia.
El equipo estudió datos anteriores que recopilaron sobre guacamayos, la segunda especie más pequeña de loros, utilizando cámaras de alta velocidad para observar cómo las aves aterrizaban en perchas de varios tamaños y materiales, incluida madera, espuma, papel de lija y teflón.
Las perchas también contenían sensores para capturar el nivel de fuerza asociado con el aterrizaje, el agacharse y el despegue.
Lo que encontraron es que los pájaros se acercan a cada aterrizaje de la misma manera, usando sus pies para lidiar con cualquier cambio que encuentren.
Específicamente, las aves envuelven sus garras alrededor de la percha y también tienen almohadillas suaves y arrugadas para los dedos que brindan una fricción confiable.
El equipo tuvo que construir una quilla lo suficientemente grande como para soportar un pequeño dron cuadricóptero y, por lo tanto, construyó su diseño en las patas de un halcón peregrino.
Tiene un chasis impreso en 3D que requirió 20 iteraciones para dominarlo, con motores y un hilo de pescar para músculos y tendones.
Su acción de embrague tarda 20 milisegundos, y tan pronto como envuelve la rama, el acelerómetro en el pie derecho le dice al robot que ha aterrizado.
Esto, a su vez, activa un algoritmo de equilibrio que inclina al robot hacia adelante para evitar caer hacia atrás como un pájaro real.
El robot de aves completo recogió con éxito los elementos que se le arrojaron, como bolsas de frijoles y pelotas de tenis, y pudo aterrizar en condiciones reales en los bosques de Oregón.
Además de las posibles aplicaciones futuras de los drones, Lentink dijo que la construcción de tales robots podría conducir a nuevos conocimientos sobre la morfología aviar.
Por ejemplo, el equipo experimentó con los dos arreglos más comunes de los dedos de los pies que se ven en las aves: tres dedos en la parte delantera y uno en la parte posterior, frente a dos en la parte delantera y dos en la parte posterior, y descubrió que no suponían ninguna diferencia para el robot. . capacidad de absorber.
Esto les dice a los biólogos que estas diferencias evolutivas surgieron por otras razones.
«Parte de la motivación detrás de este trabajo fue crear herramientas que podamos usar para estudiar el mundo natural», dijo el coautor William Rodrik en un comunicado.

«Alborotador. Amante de la cerveza. Total aficionado al alcohol. Sutilmente encantador adicto a los zombis. Ninja de twitter de toda la vida».



More Stories
La Vía Láctea sobrevivió a una violenta batalla galáctica contra todo pronóstico científico
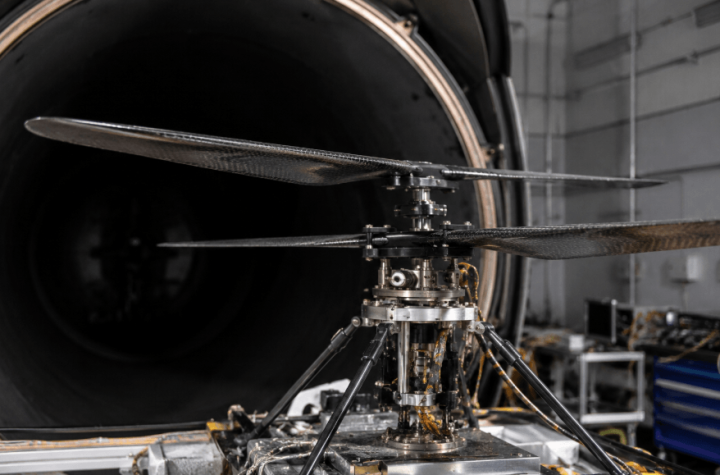
La NASA prueba helicópteros supersónicos para futuras misiones en Marte
La NASA descarta el impacto del asteroide 2024 YR4 contra la Luna en 2032