



Los simuladores de conducción actualmente tienen un gran problema: no parecen lo suficientemente realistas, especialmente las cosas en el fondo, como árboles y señales de tráfico. Pero los investigadores han desarrollado una nueva forma de crear imágenes realistas de simuladores, allanando el camino para mejores pruebas de autos sin conductor.
Los gráficos por computadora tradicionales usan modelos detallados, cuadrículas y texturas para representar imágenes 2D a partir de escenas 3D, un proceso laborioso que produce imágenes que a menudo son menos realistas, especialmente en el fondo. Sin embargo, al usar un marco de aprendizaje automático llamado Generative Adversarial Network (GAN), los investigadores pudieron entrenar su software para generar aleatoriamente entornos realistas al mejorar la fidelidad visual del software: el nivel de representación de gráficos de computadora que comparte con la realidad.
 Esto es especialmente importante cuando se prueba cómo interactúan los humanos cuando están en vehículos sin conductor o, alternativamente, en la carretera con ellos.
Esto es especialmente importante cuando se prueba cómo interactúan los humanos cuando están en vehículos sin conductor o, alternativamente, en la carretera con ellos.
«Cuando las simulaciones de conducción parecen juegos de computadora, la mayoría de las personas no las toman en serio», dijo. Akim Yurtsiverautor principal del estudio y coautor del estudio Ingeniería Eléctrica e Informática en la Universidad Estatal de Ohio. «Es por eso que queremos que nuestras simulaciones se parezcan lo más posible al mundo real».
El estudio fue publicado en la revista Transacciones IEEE en sistemas de transporte inteligentes.
Los investigadores comenzaron a utilizar CARLA, un simulador de conducción de código abierto, como base. Luego usaron un sintetizador de imágenes basado en GAN para mostrar elementos de fondo como edificios, plantas e incluso el cielo, y combinarlos con objetos más tradicionales.
Yurtsever dijo que las simulaciones de conducción seguirán requiriendo tecnologías tradicionales de visualización de gráficos que requieren mucha mano de obra para mostrar objetos básicos de interés, como automóviles cercanos. Pero con AI, se puede entrenar una GAN para crear fondos realistas y en primer plano utilizando datos del mundo real.
Uno de esos desafíos que enfrentaron los investigadores fue enseñar a su software a reconocer patrones en sus entornos, una habilidad necesaria para detectar y crear objetos como vehículos, árboles y sombras, y distinguir estos objetos entre sí.
«La belleza de esto es que estos patrones y texturas en nuestro modelo no fueron diseñados por ingenieros», dijo Yurtsever. «Tenemos un modelo de reconocimiento de características, pero la red neuronal lo aprende por sí sola».
Sus hallazgos mostraron que mezclar los objetos de primer plano de manera diferente a la escena de fondo mejoró el fotorrealismo de toda la imagen.
Sin embargo, en lugar de modificar una simulación completa de una sola vez, el proceso debe realizarse cuadro por cuadro. Pero como no vivimos en un mundo cuadro por cuadro, el próximo paso del proyecto será mejorar la consistencia temporal del software, con cada cuadro siendo consistente con los cuadros anteriores y posteriores para que los usuarios puedan experimentar una experiencia fluida e impresionante. dijo Yurtsever.
El desarrollo de tecnologías fotorrealistas también podría ayudar a los científicos a estudiar las complejidades de la distracción del conductor y ayudar a mejorar las experiencias con conductores reales, dijo Yurtsiver. Y con acceso a conjuntos de datos más grandes de escenas en la carretera, simulaciones de conducción más completas podrían cambiar la forma en que los humanos y la IA comienzan a compartir la carretera.
«Nuestra investigación es un paso muy importante para conceptualizar y probar nuevas ideas», dijo Ursever. «Nunca podremos reemplazar las pruebas del mundo real, pero si podemos mejorar un poco la simulación, podemos obtener una mejor visión de cómo podemos mejorar los sistemas de conducción autónoma y cómo interactuamos con ellos».
Los coautores son Ibrahim Mert Kog y Keith A. Redmill y Dongfang Yang, quienes trabajan en ingeniería eléctrica e informática en Ohio. El estudio fue apoyado por el Departamento de Transporte de los Estados Unidos.

«Alborotador. Amante de la cerveza. Total aficionado al alcohol. Sutilmente encantador adicto a los zombis. Ninja de twitter de toda la vida».



More Stories
La Vía Láctea sobrevivió a una violenta batalla galáctica contra todo pronóstico científico
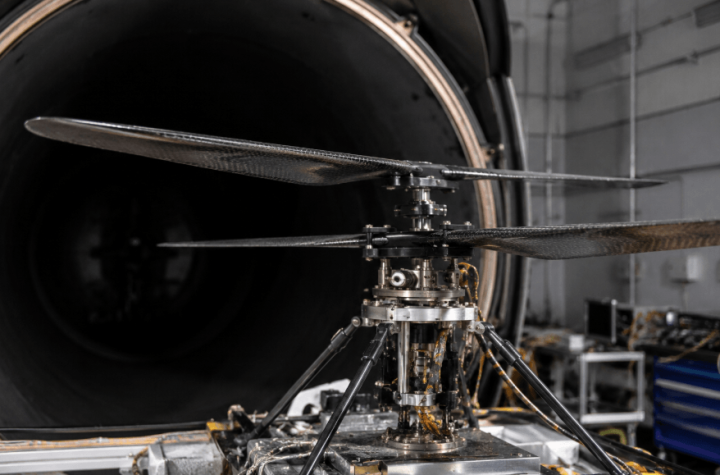
La NASA prueba helicópteros supersónicos para futuras misiones en Marte
La NASA descarta el impacto del asteroide 2024 YR4 contra la Luna en 2032