



La robótica del MIT ha desarrollado un dedo excavador robótico que excava debajo de las superficies y detecta su entorno, algo así como un lunar. Su nuevo diseño se detalla en un artículo publicado en Archivo de acceso abierto ArXiv.
El MIT Digger Finger está diseñado para caracterizar la forma de los objetos enterrados en materiales granulares como arena y grava. Para hacer esto, tuvieron que desarrollar una mano robótica con dedos delgados que pudieran vibrar para expulsar los granos compactos de arena.
«La La idea es hacer un dedo que tenga un buen sentido del tacto y pueda distinguir entre las diferentes cosas que sienten «, dice el autor del estudio Edward Adelson. Explicó en un comunicado de prensa. Esto será útil si, por ejemplo, está tratando de encontrar y deshabilitar bombas enterradas.
Basado en trabajos anteriores del MIT sobre tacto sintético
La nueva tecnología se basa en trabajos anteriores del mismo equipo de investigadores sobre un sensor táctil. Tecnología llamada GelSight, Que proporciona mapas en 3D increíblemente detallados de objetos mediante el tacto artificial.
Gelsight Consiste en un gel transparente cubierto con una película reflectante y un juego de luces LED. Los rayos de luz de los LED se distorsionan a medida que el gel se deforma cuando entra en contacto con objetos. La luz distorsionada, a su vez, es analizada por un algoritmo de aprendizaje automático que caracteriza la forma tridimensional del objeto causante de esta distorsión.

Para el nuevo sistema Digger Finger, el equipo del MIT modificó este sistema para que pareciera una manguera de aspiradora: un diseño cilíndrico delgado que le permite penetrar en materiales granulares, y dos de las tres bombillas se reemplazan con pintura fluorescente de color para ahorra espacio.
El equipo detrás de Digger Finger cree que su nuevo desarrollo podría usarse para una detección más precisa debajo de la superficie. Por lo general, los investigadores utilizan métodos como el radar de penetración en el suelo o las vibraciones de ultrasonido. Si bien estos permiten un rango sensorial más largo, estas técnicas a veces no distinguen entre diferentes tipos de materiales, como rocas y huesos, por ejemplo.
Mejorando los campos de la robótica y el tacto industrial
La tecnología Digger Finger se une a todo el conjunto de nuevas innovaciones de manos robóticas que se han introducido en los últimos años. El campo de la robótica suave, en particular, es el desarrollo de manos robóticas con la capacidad sin precedentes de sostener y detectar objetos sensibles sin romperlos.
En 2019, investigadores del Wes Institute of Engineering de la Universidad de Harvard y el Baruch College de la City University of New York desarrollaron un dispositivo de agarre robótico suave. Capaz de llevar una medusaEs agua en un 95 por ciento, sin dañar el organismo. Asimismo, el diestro OpenAI presentó Una mano robótica humanoide En 2019 con la capacidad de resolver un cubo de Rubik usando Aprendizaje Aumentado.
Con Digger Finger del Instituto de Tecnología de Massachusetts, el equipo prevé que las manos robóticas eventualmente se volverán tan hábiles como sus contrapartes humanas y realizarán tareas sensibles que actualmente solo estarían reservadas para humanos especializados en un campo como el cirujano.
«Cuando mejoramos en el toque artificial, queremos poder usarlo en situaciones en las que estás rodeado de todo tipo de información que te distraiga», dijo Adelson. «Queremos poder distinguir entre las cosas importantes y las que no lo son».
A corto plazo, afirmaron los investigadores, el Digger Finger podría usarse para buscar bombas o cables enterrados en lugares peligrosos.
En última instancia, el último trabajo del equipo del MIT ayudará a mejorar la tecnología táctil artificial, y el equipo continuará desarrollando la capacidad de la mano robótica para enfocarse con precisión en objetos específicos y cancelar el ruido innecesario del suelo.

«Alborotador. Amante de la cerveza. Total aficionado al alcohol. Sutilmente encantador adicto a los zombis. Ninja de twitter de toda la vida».



More Stories
La Vía Láctea sobrevivió a una violenta batalla galáctica contra todo pronóstico científico
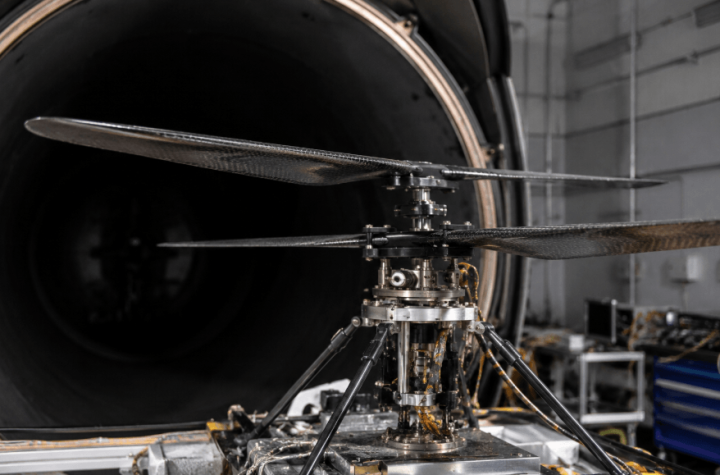
La NASA prueba helicópteros supersónicos para futuras misiones en Marte
La NASA descarta el impacto del asteroide 2024 YR4 contra la Luna en 2032